I'm a robotics researcher with 6+ years of experience working at Field Robotics Lab. I recently completed my PhD in computer engineering - Robotics under Professor Hanumant Singh. at Institute for Experiential Robotics, Northeastern University.
My research interests lies at intersection of perception, system integration to build reliable autonomous robots for real world environments.
site.status -> Work-in-progress

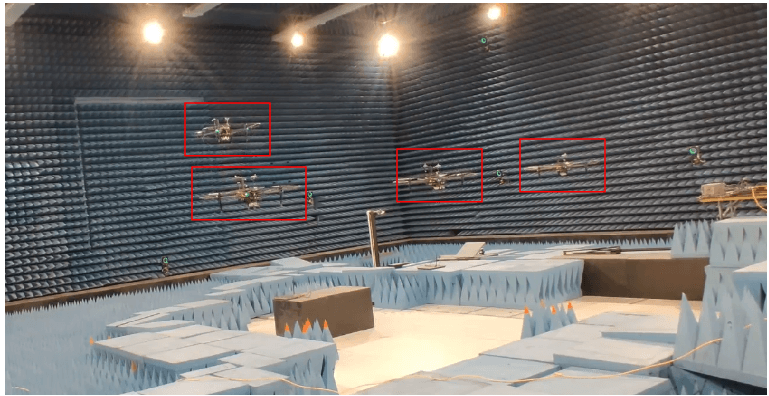
Anechoic
Chamber at NEU Burlington Campus, © News,
Northeastern University.